Actualmente los sistemas embebidos están en todos lados, en las casas, oficinas, automóviles, fabricas, hospitales y electrónicos. Físicamente los sistemas embebidos pueden ser desde dispositivos portátiles como teléfonos, relojes digitales y reproductores mp3, hasta luces de tráfico, controladores de fabricas o los sistemas que controlan las plantas nucleares.
Un sistema embebido es cualquier computadora que es un componente de un gran sistema que depende de su propio microprocesador. Es embebido al ser parte de un dispositivo completo, que frecuentemente incluye otro hardware o partes mecánicas.
Características de los sistemas embebidos
Los sistemas embebidos estan diseñados para hacer una tarea en específico y cumplir con ella en vez de ser más versátiles. Pero esto no significa que sean dispositivos independientes. Muchos de los sistemas embebidos consisten en pequeñas partes computalizadas dentro de un gran dispositivo que sirve un propósito en general. Por ejemplo un automóvil:
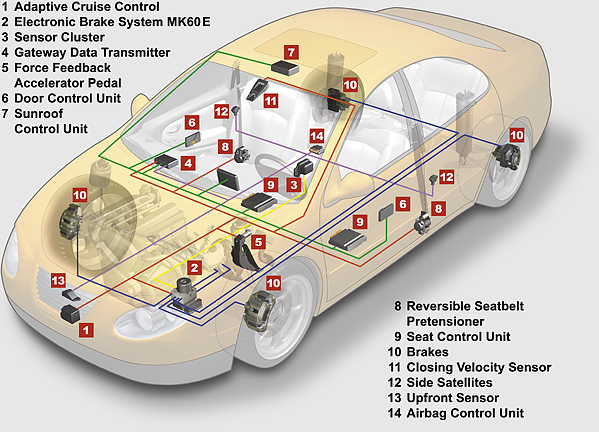
(Imágen tomada de: http://www.aa1car.com/library/bywire2.jpg)
En el automóvil cada sistema embebido dentro del automóvil proporciona una función específica como un subsistema del automóvil propio.
Los programas escritos para los sistemas embebidos son llamados firmware, y son guardados en memoria de solo lectura o memorias flash. Estos programas corren con recursos limitados, poca memoria y con pantallas y teclados pequeños o no existentes(sin forma de entrada o salida).
Seguridad
Por lo general los sistemas embebidos pertenecen a máquinas que se espera que funcionen por años, y en algunos casos se programan para que se recuperen de dichos errores. Por esto el software es usualmente desarrollado y probado mucho más cuidadosamente que el software desarrollado para computadoras.

Los satélites son sistemas que se esperan que funcionen por años, ya que son inaccesibles para repararlos mientras están en funcionamiento.
Algunos problemas de seguridad específicos serían:
- El sistema no se puede apagar de forma segura para reparar, o es inaccesible para repararlo. Estos pueden ser sistemas espaciales(satélites, sondas), cables bajo el mar, y automóviles accidentados.
- El sistema debe seguir encendido por seguridad. Navegación aérea, sistemas de control de reactores nucleares, señales de tren, motores en aviones de un solo motor.
- La empresa perderá grandes cantidades de dinero cuando el sistema se apague. Controles de fabrica, sistemas de telefonía, sistemas de juego en línea(PSN).
Diversas técnicas son usadas para recuperarse de estos errores, tanto bugs de software como errores en el hardware.
- Subsistemas con piezas de repuesto a las cuales cambiar.
- Un modo de software parcial
- Timer que reinicia el sistema amenos que el sistema le notifique.
Procesadores en los sistemas embebidos
Un microprocesador es una implementación en forma de circuito integrado de la Unidad Central de Proceso CPU de una computadora.
Los subsistemas de entrada/salida y memoria pueden ser combinados con un subsistema de CPU para formar una computadora o sistema embebido completo. Estos subsistemas se interconectan mediante los buses de sistema (formados a su vez por el bus de control, el bus de direcciones y el bus de datos).
El subsistema de entrada acepta datos del exterior para ser procesados mientras que el subsistema de salida transfiere los resultados hacia el exterior. Lo más habitual es que haya varios subsistemas de entrada y varios de salida. A estos subsistemas se les reconoce habitualmente como periféricos de E/S.
Un microcontrolador es un circuito integrado que incluye una CPU, memoria y circuitos de E/S. Entre los subsistemas de E/S que incluyen los microcontroladores se encuentran los temporizadores, losconvertidores analógico a digital (ADC) y digital a analógico (DAC) y los canales de comunicaciones serie. Estos subsistemas de E/S se suelen optimizar para aplicaciones específicas (por ejemplo audio, video, procesos industriales, comunicaciones, etc.)
Los subsistemas de entrada/salida y memoria pueden ser combinados con un subsistema de CPU para formar una computadora o sistema embebido completo. Estos subsistemas se interconectan mediante los buses de sistema (formados a su vez por el bus de control, el bus de direcciones y el bus de datos).
El subsistema de entrada acepta datos del exterior para ser procesados mientras que el subsistema de salida transfiere los resultados hacia el exterior. Lo más habitual es que haya varios subsistemas de entrada y varios de salida. A estos subsistemas se les reconoce habitualmente como periféricos de E/S.
Un microcontrolador es un circuito integrado que incluye una CPU, memoria y circuitos de E/S. Entre los subsistemas de E/S que incluyen los microcontroladores se encuentran los temporizadores, losconvertidores analógico a digital (ADC) y digital a analógico (DAC) y los canales de comunicaciones serie. Estos subsistemas de E/S se suelen optimizar para aplicaciones específicas (por ejemplo audio, video, procesos industriales, comunicaciones, etc.)
PIC

(Imágen tomada de: http://upload.wikimedia.org/wikipedia/commons/thumb/9/90/PIC1655A_GI.jpg/220px-PIC1655A_GI.jpg)
El PIC(Programmable Intelligent Computer) es un microcontrolador popular entre ingenieros. Existen diferentes dispositivos PIC con diversos componentes y capacidades.
Los PIC cuentan con una arquitectura Harvard(donde el área de código y almacenamiento de datos están separados uno del otro)
Muchos tipos de proyectos electrónicos pueden ser construidos fácilmente usando algún PIC, entre ellos relojes, videojuegos simples, robots, y más. El PIC es un mictrocontrolador de propósito general que puede tener diferentes componentes por precios razonables.
En la siguiente página se pueden ver algunas recomendaciones de PICS hechas por gente que trabaja con ellos: http://en.wikibooks.org/wiki/Embedded_Systems/PIC_Microcontroller
Programación del PIC
Para transferir el código de la computadora al PIC normalmente se usa un programador. La mayoría de PICs que se distribuyen hoy en día incorporan ICSP (In Circuit Serial Programming, programación serie incorporada) o LVP (Low Voltage Programming, programación a bajo voltaje), lo que permite programar el PIC directamente en el circuito destino.
Existen muchos programadores de PICs, desde los más simples que dejan al software los detalles de comunicaciones, a los más complejos, que pueden verificar el dispositivo a diversas tensiones de alimentación e implementan en hardware casi todas las funcionalidades
Fuente de alimentación
La parte más importante de un circuito es la fuente de alimentación. El PIC requiere +5Volts y +13Volts regulados de fuente de alimentación. La razón por la cual se necesitan dos fuentes de alimentación es por la diferente programación de algoritmos:
- High Power Programming Mode(+13V)
- Low Power Programming Mode(+5V)
Referencias:
Muy bien; te pongo 8 para el lab.
ResponderEliminarMuy bien; te pongo en 4 y te doy tu 10
ResponderEliminar